ผลต่างระหว่างรุ่นของ "204512/บรรยาย 6"
Jittat (คุย | มีส่วนร่วม) |
Chalet16 (คุย | มีส่วนร่วม) (แก้ข้อความอ่านไม่ออก(ใช้ wget + KHexedit + HTML Decode) ทั้งหมด) |
||
| (ไม่แสดง 20 รุ่นระหว่างกลางโดยผู้ใช้ 4 คน) | |||
| แถว 1: | แถว 1: | ||
| + | ertalia | ||
{{หัวคำบรรยาย|204512}} | {{หัวคำบรรยาย|204512}} | ||
| + | '''จดบันทึกคำบรรยายโดย:'''<br> | ||
| + | ณัฐ เรืองฤทธิ์ 50653773<br> | ||
| + | อมรเดช แจ่มสว่าง 50653963<br> | ||
| + | |||
| + | ในบทนี้จะพูดถึงปัญหาการหาเส้นทางที่สั้นที่สุด โดยจะเริ่มจากนิยามและพิสูจน์การมีอยู่ของเส้นทางที่สั้นที่สุดเมื่อไม่มีวงรอบที่เป็นลบ จากนั้นจะอธิบายถึง Single Source Shortest Path | ||
==นิยาม== | ==นิยาม== | ||
| แถว 21: | แถว 27: | ||
เส้นทางดังกล่าวคือ negative length cycle | เส้นทางดังกล่าวคือ negative length cycle | ||
| − | ;นิยาม : เราจะเรียกวงรอบที่มีความยาวเป็นลบ ว่า negative length cycle หรือ negative cycle | + | {{กล่องนิยาม|;นิยาม : เราจะเรียกวงรอบที่มีความยาวเป็นลบ ว่า '''negative length cycle''' หรือ '''negative cycle'''}} |
| + | |||
| + | เราจะเรียก path ใด ๆ ว่าเป็น <u>simple path</u> ถ้าไม่มีโหนดใดๆ ประกฎใน path มากกว่า 1 ครั้ง และจะเรียก path ใด ๆ ว่าเป็น | ||
| + | <u>''s''-''t'' path</u> ถ้า path นั้นเริ่มที่ ''s'' และสิ้นสุดที่ ''t'' | ||
ทฤษฎีบทด้านล่างแสดงว่าถ้ากราฟจะมีเส้นทางที่สั้นที่สุด เมื่อและต่อเมื่อ กราฟไม่มีวงรอบที่เป็นลบ | ทฤษฎีบทด้านล่างแสดงว่าถ้ากราฟจะมีเส้นทางที่สั้นที่สุด เมื่อและต่อเมื่อ กราฟไม่มีวงรอบที่เป็นลบ | ||
| − | {{ | + | {{กล่องทฤษฎีบท|'''Theorem:''' ถ้าไม่มี negative cycle ''C'' ที่ไปถึงได้จาก ''s'' และบางใหนดใน ''C'' สามารถไปถึง ''t'' ได้, |
จะมี shortest path จาก ''s'' ไป ''t''}} | จะมี shortest path จาก ''s'' ไป ''t''}} | ||
{{เริ่มบทพิสูจน์}} | {{เริ่มบทพิสูจน์}} | ||
| − | '''Proof''' | + | '''Proof:''' |
| − | + | สังเกตว่าสำหรับ ''s-t'' path ''P'' ใดๆ จะมี simple ''s''-''t'' path ''P''' ที่มีความยาวไม่มากกว่า ''P'' ทั้งนี้เนื่องจากถ้าเส้นทางนั้นมี cycle เราสามารถตัด cycle นั้นออกได้โดยไม่ทำให้ความยาวของเส้นทางที่ได้ยาวขึ้น (ดูรูปด้านล่าง) | |
| − | + | <center>[[ภาพ:sp02.png]]</center> | |
| − | + | ||
| − | + | เนื่องจากจำนวน simple ''s-t'' path มีจำกัด (ไม่เกิน n! path) เมื่อ n = จำนวนโหนดในกราฟ ดังนั้นจะมี path ที่มีความยาวสั้นที่สุด | |
| − | [[ภาพ:sp02.png]]< | ||
| − | |||
{{จบบทพิสูจน์}} | {{จบบทพิสูจน์}} | ||
| + | lirelrol | ||
==Single Source Shortest Path== | ==Single Source Shortest Path== | ||
ในปัญหา single source shortest path เราจะได้รับ source ''s'' แล้วหา shortest path จาก ''s'' ไปยังทุกๆ โหนด | ในปัญหา single source shortest path เราจะได้รับ source ''s'' แล้วหา shortest path จาก ''s'' ไปยังทุกๆ โหนด | ||
| − | {{ | + | {{กล่องนิยาม| |
;นิยาม : ต้นไม้ ''T'' ที่มี ''s'' เป็น root เป็น '''shortest path tree''' ถ้าทุกๆ path ใน ''T'' เป็น shortest path}} | ;นิยาม : ต้นไม้ ''T'' ที่มี ''s'' เป็น root เป็น '''shortest path tree''' ถ้าทุกๆ path ใน ''T'' เป็น shortest path}} | ||
ให้ต้นไม้ ''T'', เราให้ ''dist<sub>T</sub>'' แทนความยาวของ path ใน ''T'' จาก ''s'' ไป ''u'' ทฤษฎีบทด้านล่างให้เงื่อนไขที่รับรองว่า ''T'' เป็น shortest path tree | ให้ต้นไม้ ''T'', เราให้ ''dist<sub>T</sub>'' แทนความยาวของ path ใน ''T'' จาก ''s'' ไป ''u'' ทฤษฎีบทด้านล่างให้เงื่อนไขที่รับรองว่า ''T'' เป็น shortest path tree | ||
| − | {{ | + | {{กล่องทฤษฎีบท| |
'''Theorem:''' | '''Theorem:''' | ||
| − | + | ถ้าสำหรับทุก ๆ เส้นเชื่อม (''u'',''v'') ในกราฟ | |
<center><math>dist_T(v)\le dist_T(u) + length(u,v)</math></center> | <center><math>dist_T(v)\le dist_T(u) + length(u,v)</math></center> | ||
แล้ว T จะเป็น shortest path tree | แล้ว T จะเป็น shortest path tree | ||
| แถว 67: | แถว 75: | ||
::เราทราบว่า<math>length(u,v) \ge dist_T(v) - dist_T(u)</math> <br> | ::เราทราบว่า<math>length(u,v) \ge dist_T(v) - dist_T(u)</math> <br> | ||
::นำมา map กับ P<br> | ::นำมา map กับ P<br> | ||
| − | ::จะได้ว่า <math>length(P) \ge (dist_T(v_1)-dist_T(v_0))+(dist_T(v_2)-dist_T(v1))+...+(dist_T(v_k | + | ::จะได้ว่า <math>length(P) \ge (dist_T(v_1)-dist_T(v_0))+(dist_T(v_2)-dist_T(v1))+...+(dist_T(v_k)-dist_T(v_k-1))</math> <br> |
::<math>length(P) \ge dist_T(v_k)-dist_T(v_0)</math><br> | ::<math>length(P) \ge dist_T(v_k)-dist_T(v_0)</math><br> | ||
::<math>length(P) \ge dist_T(t)-0</math><br> | ::<math>length(P) \ge dist_T(t)-0</math><br> | ||
| แถว 87: | แถว 95: | ||
[[ภาพ:sp05.png]] | [[ภาพ:sp05.png]] | ||
---- | ---- | ||
| + | {{กล่องทฤษฎีบท| | ||
'''Lemma''' | '''Lemma''' | ||
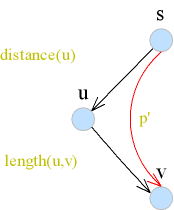
:ถ้า <math>distance(u)\ne\infty</math> , จะมี path จาก s ไป u ที่มีความยาว distance(u)<br> | :ถ้า <math>distance(u)\ne\infty</math> , จะมี path จาก s ไป u ที่มีความยาว distance(u)<br> | ||
| + | }} | ||
| + | {{เริ่มบทพิสูจน์}} | ||
'''Proof''' | '''Proof''' | ||
: assume ว่า lemma จริงเมื่อตอนต้นการทำงาน<br> | : assume ว่า lemma จริงเมื่อตอนต้นการทำงาน<br> | ||
| แถว 98: | แถว 109: | ||
::<math>distance(v)\leftarrow distance(u) + length(u,v)</math><br> | ::<math>distance(v)\leftarrow distance(u) + length(u,v)</math><br> | ||
::ซึ่งเท่ากับความยาวของ <math>p' = p \cup \{u,v\}</math> | ::ซึ่งเท่ากับความยาวของ <math>p' = p \cup \{u,v\}</math> | ||
| + | {{จบบทพิสูจน์}} | ||
---- | ---- | ||
| + | {{กล่องทฤษฎีบท| | ||
'''Lemma''' | '''Lemma''' | ||
| − | :ถ้า labelling step terminate ,parent | + | :ถ้า labelling step terminate ,parent p จะ form ตัวเป็น shortest path tree T |
:และสำหรับ u ที่ <math>distance(u)\ne\infty</math> , distance(u)จะเท่ากับความยาวของ path ใน T จาก s ไป u | :และสำหรับ u ที่ <math>distance(u)\ne\infty</math> , distance(u)จะเท่ากับความยาวของ path ใน T จาก s ไป u | ||
| + | }} | ||
'''กำหนดให้''' | '''กำหนดให้''' | ||
| − | *<math>p^k( | + | *<math>p^k(u) = p(p^{k-1}(u))\,</math> |
| − | *<math>p^1( | + | *<math>p^1(u) = p(u)\,</math> |
| + | {{เริ่มบทพิสูจน์}} | ||
'''Proof'''<br> | '''Proof'''<br> | ||
'''(I)''' | '''(I)''' | ||
| แถว 140: | แถว 155: | ||
# parent จะ form ตัวกันเป็น tree T | # parent จะ form ตัวกันเป็น tree T | ||
# ทุกๆ edge ที่สอดคล้องกับ (I) ทำให้ T เป็น shortest path tree<br><br> | # ทุกๆ edge ที่สอดคล้องกับ (I) ทำให้ T เป็น shortest path tree<br><br> | ||
| − | + | {{จบบทพิสูจน์}} | |
| − | |||
| − | == Labelling & | + | == Labelling & Scanning Method == |
แต่ละโหนดจะมีสถานะได้ดังนี้ | แต่ละโหนดจะมีสถานะได้ดังนี้ | ||
:* Unlabelled | :* Unlabelled | ||
| แถว 167: | แถว 181: | ||
:Running time จาก Algorithm นี้คือ O(m+n) | :Running time จาก Algorithm นี้คือ O(m+n) | ||
:<b><u>***Topological ของโหนด</u></b> คือ การเรียงของโหนดที่รับประกันได้ว่าไม่มี edge จากโหนดด้านหลังชี้มายังโหนดด้านหน้า<br><br> | :<b><u>***Topological ของโหนด</u></b> คือ การเรียงของโหนดที่รับประกันได้ว่าไม่มี edge จากโหนดด้านหลังชี้มายังโหนดด้านหน้า<br><br> | ||
| − | ;<b>(II) กราฟไม่มี edge ที่ความยาวเป็นลบ [Dijkstra's Algorithm]</b><br><br> | + | ;<b>(II) กราฟไม่มี edge ที่ความยาวเป็นลบ [Dijkstra's Algorithm]</b><br><br> <br><br> |
:ในบรรดาโหนดที่มีสถานะเป็น Labelled ให้ Scan โหนด w ที่ distance(w) น้อยที่สุด <u>โดยจะไม่ Scan ซ้ำ</u><br> | :ในบรรดาโหนดที่มีสถานะเป็น Labelled ให้ Scan โหนด w ที่ distance(w) น้อยที่สุด <u>โดยจะไม่ Scan ซ้ำ</u><br> | ||
:จะใช้ Priority Queue : เข้ามาช่วยในการทำ Algorithm โดยที่<br><br><br> | :จะใช้ Priority Queue : เข้ามาช่วยในการทำ Algorithm โดยที่<br><br><br> | ||
รุ่นแก้ไขปัจจุบันเมื่อ 13:33, 18 มีนาคม 2551
ertalia
บันทึกคำบรรยายวิชา 204512 นี้ เป็นบันทึกที่นิสิตเขียนขึ้น เนื้อหาโดยมากยังไม่ผ่านการตรวจสอบอย่างละเอียด การนำไปใช้ควรระมัดระวัง
จดบันทึกคำบรรยายโดย:
ณัฐ เรืองฤทธิ์ 50653773
อมรเดช แจ่มสว่าง 50653963
ในบทนี้จะพูดถึงปัญหาการหาเส้นทางที่สั้นที่สุด โดยจะเริ่มจากนิยามและพิสูจน์การมีอยู่ของเส้นทางที่สั้นที่สุดเมื่อไม่มีวงรอบที่เป็นลบ จากนั้นจะอธิบายถึง Single Source Shortest Path
เนื้อหา
นิยาม
เราจะเริ่มต้นด้วยนิยามของเส้นทางสั้นที่สุด
ให้ directed graph G = (V,E) และฟังก์ชัน ที่ระบุความยาวบนเส้นเชื่อม กล่าวคือความยาวของเส้นเชื่อม (u,v) คือ length(u,v)

สำหรับเส้นทาง P ใด ๆ เราจะนิยามความยาว length(P) เป็น

เส้นทางที่สั้นที่สุด (shotest path) จาก s ไป t คือเส้นทาง P ที่เริ่มที่ s สิ้นสุดที่ t ที่มีความยาวน้อยที่สุด
วงรอบที่เป็นลบกับเส้นทางที่สั้นที่สุด
ปัญหาแรกที่เราสนใจก็คือ: เส้นทางที่สั้นที่สุดจะมีในทุก ๆ กราฟหรือไม่?
พิจารณากราฟต่อไปนี้

จากรูปจะเห็นได้ว่าถ้ามีการเลือกเส้นทางวนตรงกลางกราฟ จะสามารถวนซ้ำให้ค่าความยาวติดลบเท่าไหร่ก็ได้
เส้นทางดังกล่าวคือ negative length cycle
- นิยาม
- เราจะเรียกวงรอบที่มีความยาวเป็นลบ ว่า negative length cycle หรือ negative cycle
เราจะเรียก path ใด ๆ ว่าเป็น simple path ถ้าไม่มีโหนดใดๆ ประกฎใน path มากกว่า 1 ครั้ง และจะเรียก path ใด ๆ ว่าเป็น s-t path ถ้า path นั้นเริ่มที่ s และสิ้นสุดที่ t
ทฤษฎีบทด้านล่างแสดงว่าถ้ากราฟจะมีเส้นทางที่สั้นที่สุด เมื่อและต่อเมื่อ กราฟไม่มีวงรอบที่เป็นลบ
Theorem: ถ้าไม่มี negative cycle C ที่ไปถึงได้จาก s และบางใหนดใน C สามารถไปถึง t ได้, จะมี shortest path จาก s ไป t
Proof: สังเกตว่าสำหรับ s-t path P ใดๆ จะมี simple s-t path P' ที่มีความยาวไม่มากกว่า P ทั้งนี้เนื่องจากถ้าเส้นทางนั้นมี cycle เราสามารถตัด cycle นั้นออกได้โดยไม่ทำให้ความยาวของเส้นทางที่ได้ยาวขึ้น (ดูรูปด้านล่าง)
เนื่องจากจำนวน simple s-t path มีจำกัด (ไม่เกิน n! path) เมื่อ n = จำนวนโหนดในกราฟ ดังนั้นจะมี path ที่มีความยาวสั้นที่สุด

lirelrol
Single Source Shortest Path
ในปัญหา single source shortest path เราจะได้รับ source s แล้วหา shortest path จาก s ไปยังทุกๆ โหนด
- นิยาม
- ต้นไม้ T ที่มี s เป็น root เป็น shortest path tree ถ้าทุกๆ path ใน T เป็น shortest path
ให้ต้นไม้ T, เราให้ distT แทนความยาวของ path ใน T จาก s ไป u ทฤษฎีบทด้านล่างให้เงื่อนไขที่รับรองว่า T เป็น shortest path tree
Theorem: ถ้าสำหรับทุก ๆ เส้นเชื่อม (u,v) ในกราฟ

แล้ว T จะเป็น shortest path tree
Proof
- พิจารณา s-t path ใดๆ
- P ยาว length(p)
- path on tree ยาว dist T(t)
- P ต้องมีความยาวไม่น้อยกว่า path on tree ซึ่งเป็น shortest path ทำให้ T จะเป็น shortest path tree
- Proof ด้วยวิธี induction บน P
- ให้
- ซึ่ง =s , =t
- ดังนั้น
- จาก
- เราทราบว่า
- นำมา map กับ P
- จะได้ว่า
- P มีความยาวไมน้อยกว่า path on tree ถ้าเงื่อนไขนี้เป็นตริง T จะเป็น shortest path tree










Algorithm
- เริ่มต้น
- for all
- parent(u)= null for all u
- for all
- จากนั้นจึงทำ labelling step



Labelling Step
- เลือก edge(u,v) ที่ มา
- แล้วปรับค่า
- และ




Lemma
- ถ้า , จะมี path จาก s ไป u ที่มีความยาว distance(u)

Proof
- assume ว่า lemma จริงเมื่อตอนต้นการทำงาน
- Proof by induction บนจำนวนของการทำ labelling step
- assume ว่า lemma จริงก่อนการทำงานของ step ใดๆ
- เนื่องจาก มี path p จาก s ไป u ที่มีความยาว distance(u) (by induction step)
- หลังการทำงานตาม labelling step
- ซึ่งเท่ากับความยาวของ


Lemma
- ถ้า labelling step terminate ,parent p จะ form ตัวเป็น shortest path tree T
- และสำหรับ u ที่ , distance(u)จะเท่ากับความยาวของ path ใน T จาก s ไป u
กำหนดให้


Proof
(I)
- ถ้า G มี negative cycle ที่ไปถึงได้จาก s, labelling step จะไม่หยุดการทำงาน
- ไม่ว่า distance fucntion บนโหนดจะเป็น อย่างไร
- จะมีบาง edge ที่ทำ labelling step ได้
- พิจารณา
- แสดงว่าจะมีการทำ labelling step เมื่อ
- จากรูป มีโหนดจำนวน k โหนด เขียนออกมาได้ว่า
- ซึ่งจะสามารถทำ labelling step ได้ถ้าบางแถวยังมีค่าน้อยกว่า 0
- เมื่อลองจับทุกแถวบวกกัน
- จะพบว่าเหลือแต่ค่า length รวมกันซึ่งก็คือ ความยาวของ path ใน cycle
- ซึ่งถ้าเป็น negative cycle แสดงว่าต้องมีตัวใดตัวหนึ่งมีค่าติดลบ
- ทำให้สามารถทำ labelling step ได้เสมอ
(II)
- ไม่มี v ที่ สำหรับบางค่าของ k
- แต่เราปรับค่า d(u) นั่นคือ
- นั่นคือ
- *จากเบอร์ 1 กราฟไม่มี negative cycle
(III)
- ถ้ามี path จาก s ไป v
- และ
- เพราะถ้ามี path ถึง v แสดงว่าต้องมีการ update มาถึง v เลยทำให้ และ ด้วย
จาก (I),(II),(III) จะสามารถ proof ได้กว่า
- parent จะ form ตัวกันเป็น tree T
- ทุกๆ edge ที่สอดคล้องกับ (I) ทำให้ T เป็น shortest path tree














Labelling & Scanning Method
แต่ละโหนดจะมีสถานะได้ดังนี้
- Unlabelled
- Labelled
- Scanned

- เริ่มต้นโหนดทุกโหนดยกเว้น s จะมีสถานะเป็น Unlabelled และ s มีสถานะเป็น Labelled
- และทุกครั้งที่ distance(u) เปลี่ยน u จะมีสถานะเป็น Labelled
Pre-Condition u มีสถานะเป็น Labelled
- SCAN(u):
- if distance(v) > distance(u) + length(u,v)
- เปลี่ยนสถานะของ v เป็น Labelled
- if distance(v) > distance(u) + length(u,v)
- SCAN(u):



- Claim : ถ้าทำตามวิธี Labelling & Scanning Method แล้วไม่แหลือโหนดที่มีสถานะเป็น Labelled เลย เราจะไม่สามารถทำ Labelling Step ได้อีก
Efficient Scanning Order
- (I) กราฟที่ไม่มี cycle [Directed Acyclic Graph - DAG]
- คือกราฟที่ไม่มีการเรียงแบบ Topological ของโหนด

- Running time จาก Algorithm นี้คือ O(m+n)
- ***Topological ของโหนด คือ การเรียงของโหนดที่รับประกันได้ว่าไม่มี edge จากโหนดด้านหลังชี้มายังโหนดด้านหน้า
- (II) กราฟไม่มี edge ที่ความยาวเป็นลบ [Dijkstra's Algorithm]
- ในบรรดาโหนดที่มีสถานะเป็น Labelled ให้ Scan โหนด w ที่ distance(w) น้อยที่สุด โดยจะไม่ Scan ซ้ำ
- จะใช้ Priority Queue : เข้ามาช่วยในการทำ Algorithm โดยที่
| Enqueue(k,v) | เพิ่ม (k,v) ลงใน Set |
| FindMin | ที่มีค่า k น้อยที่สุด |
| ExtractMin | ที่มีค่า k น้อยที่สุดและลบ (k,v) ออกจาก S |
| Update((k,v),k') | Update k ด้วย k' |

- Dijkstra's Algorithm
- Running Time จะแบ่งเป็น 2 ช่วงได้แก่ช่วงของการ ExtractMin (O(n)) และช่วงของการ UpdateQueue (O(m)) ซึ่งจะแตกต่างกันไป
- ตามการจัดวางของ Graph แบบต่างๆ โดยสามารถเทียบเป็นตารางได้ดังนี้










| ExtractMin | UpdateQueue | Total | |
| Array ของโหนด (Dijkstra) |
O(n) | O(1) | O(n^2) |
| Binary Heap | O(logn) | O(logn) | O((m+n)logn) |
| Fibonacci Heap | O(logn) | decrease key O(1) amortized |
O(nlogn+m) |
- (III) กราฟทั่วไป [Bellman - Ford - Moore]
- เป็นการ Scan ทุกๆ โหนดเป็นจำนวน n-1 รอบ เพราะฉะนั้น Running Time จะเป็น O(nm)