ผลต่างระหว่างรุ่นของ "สร้างเกมเดาะตะกร้อด้วย VPython"
ไปยังการนำทาง
ไปยังการค้นหา
Chaiporn (คุย | มีส่วนร่วม) |
Chaiporn (คุย | มีส่วนร่วม) |
||
| แถว 25: | แถว 25: | ||
[[Image:takro-coord.png|center|300px]] | [[Image:takro-coord.png|center|300px]] | ||
| − | == | + | == สร้างแอพลิเคชันและการตั้งค่าคงที่เพื่อใช้ในเกม == |
| + | ใช้เท็กซ์เอดิเตอร์สร้างไฟล์ชื่อ <tt>takro.py</tt> ตามโค้ดด้านล่าง | ||
| + | <syntaxhighlight lang="python" line> | ||
| + | import vis | ||
| − | == | + | ANIM_RATE = 30 |
| + | BORDER = 10 | ||
| + | scene = vis.display(title='Takro',x=100,y=100,width=500,height=500) | ||
| + | scene.center = (0,0) | ||
| + | scene.range = BORDER*1.2 | ||
| − | == | + | while True: |
| + | vis.rate(ANIM_RATE) | ||
| + | </syntaxhighlight> | ||
| + | * บรรทัดที่ 1 อิมพอร์ตโมดูล <tt>vis</tt> ซึ่งเป็นโมดูลหลักของ VPython | ||
| + | |||
| + | == สร้างลูกบอล == | ||
| + | |||
| + | == สร้างผู้เล่น == | ||
รุ่นแก้ไขเมื่อ 05:44, 17 ตุลาคม 2558
เนื้อหา
การเตรียมตัว
ไพทอนและไลบรารีที่เกี่ยวข้อง
วิกินี้ใช้ภาษาไพทอนและไลบรารีที่เกี่ยวข้องดังนี้
- Anaconda Scientific Python Distribution - ดูขั้นตอนจากวิกิ Python Programming/Setting Up Python
- ไลบรารี PyUSB - ดูขั้นตอนจากวิกิ การติดตั้งไลบรารี PyUSB
- ไลบรารี Visual (VPython) - ดูขั้นตอนจากวิกิ การติดตั้งไลบรารี Visual
บอร์ดไมโครคอนโทรลเลอร์และโมดูลไดรเวอร์
บอร์ดไมโครคอนโทรลเลอร์ที่นำมาใช้เป็นตัวควบคุมผู้เล่นในวิกินี้ต้องถูกโปรแกรมเฟิร์มแวร์ให้สามารถอ่านค่าแสงผ่านพอร์ท USB ได้แล้ว ให้แน่ใจว่า
- ได้พัฒนาเฟิร์มแวร์ตามขั้นตอนของวิกิ การติดต่อกับบอร์ดไมโครคอนโทรลเลอร์ผ่านพอร์ท USB ด้วย Arduino
- เฟิร์มแวร์รองรับการอ่านค่าแสง และได้แก้ไขโมดูลไดรเวอร์ peri.py ให้รองรับการอ่านค่าแสงในช่วง 0-1023 จากเมท็อด getLight() ได้อย่างถูกต้องตามที่ระบุไว้ในแบบฝึกหัดท้ายสไลด์บรรยาย การสื่อสารกับบอร์ด MCU ผ่านพอร์ต USB
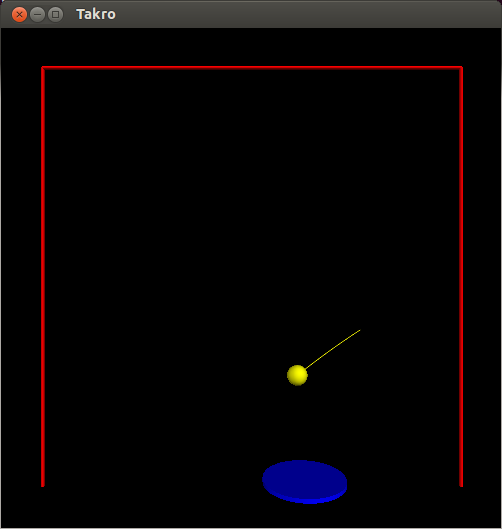
องค์ประกอบของเกม

ตัวเกมพื้นฐานประกอบไปด้วย
- แป้นรับลูกที่ควบคุมด้วยผู้เล่น (สีน้ำเงิน) สร้างขึ้นจากคลาส Player ซึ่งสืบสกุลมาจากคลาส vis.cylinder มีการเคลื่อนที่ในทิศทางซ้ายและขวาตามความเข้มของแสงที่อ่านได้จากบอร์ดไมโครคอนโทรลเลอร์
- ลูกตะกร้อ (สีเหลือง) สร้างขึ้นจากคลาส Ball ซึ่งสืบสกุลมาจากคลาส vis.sphere มีทิศทางการเคลื่อนที่ในสองมิติซึ่งคำนวณจากกฎการเคลื่อนที่
- กำแพงและเพดาน (สีแดง) สร้างขึ้นจากคลาส vis.curve เพื่อใช้แสดงขอบเขตด้านซ้าย ขวา และบน ลูกตะกร้อจะกระดอนกลับเมื่อเคลื่อนที่เลยขอบเขตนี้
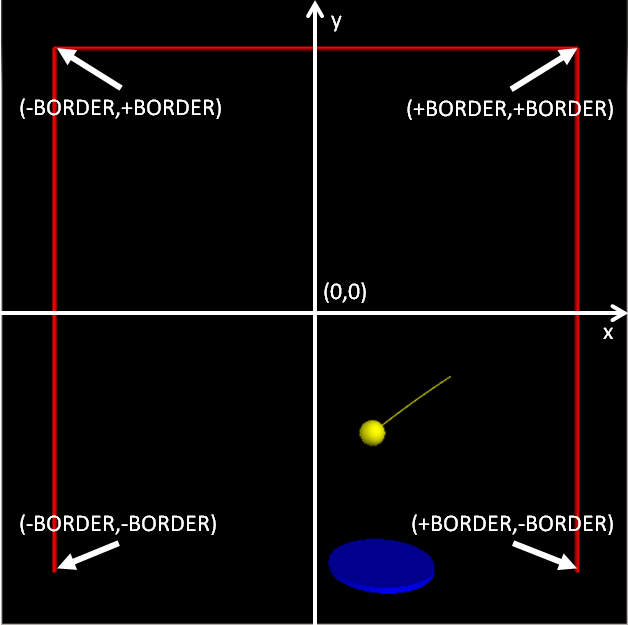
ระบบพิกัด
VPython ใช้ระบบพิกัดในปริภูมิ 3 มิติ อย่างไรก็ตามตำแหน่งต่าง ๆ ของผู้เล่น ลูกตะกร้อ และกำแพง จะวางตัวอยู่ในระนาบ z=0 โดยที่พิกัด (x,y) มีทิศทางและขอบเขตดังภาพ ในที่นี้ BORDER เป็นค่าคงที่ที่กำหนดขึ้นมาในโปรแกรมซึ่งสามารถปรับเปลี่ยนขอบเขตได้ตามต้องการ

สร้างแอพลิเคชันและการตั้งค่าคงที่เพื่อใช้ในเกม
ใช้เท็กซ์เอดิเตอร์สร้างไฟล์ชื่อ takro.py ตามโค้ดด้านล่าง
1 import vis
2
3 ANIM_RATE = 30
4 BORDER = 10
5 scene = vis.display(title='Takro',x=100,y=100,width=500,height=500)
6 scene.center = (0,0)
7 scene.range = BORDER*1.2
8
9 while True:
10 vis.rate(ANIM_RATE)
- บรรทัดที่ 1 อิมพอร์ตโมดูล vis ซึ่งเป็นโมดูลหลักของ VPython