ผลต่างระหว่างรุ่นของ "สร้างเกมเดาะตะกร้อด้วย VPython"
ไปยังการนำทาง
ไปยังการค้นหา
Chaiporn (คุย | มีส่วนร่วม) |
Chaiporn (คุย | มีส่วนร่วม) |
||
| แถว 58: | แถว 58: | ||
== สร้างลูกตะกร้อ == | == สร้างลูกตะกร้อ == | ||
| − | + | นิยามคลาส <tt>Ball</tt> เพื่อใช้สร้างเป็นลูกตะกร้อ โดยให้สืบสกุลมาจากคลาสทรงกลม <tt>vis.sphere</tt> ของ VPython ดังโค้ดด้านล่าง | |
| − | <syntaxhighlight lang="python" line highlight="9-24, | + | <syntaxhighlight lang="python" line highlight="9-24,31"> |
import vis | import vis | ||
| แถว 85: | แถว 85: | ||
################################################################ | ################################################################ | ||
| − | |||
border = vis.curve(pos=[ | border = vis.curve(pos=[ | ||
(-BORDER,-BORDER), | (-BORDER,-BORDER), | ||
รุ่นแก้ไขเมื่อ 07:04, 17 ตุลาคม 2558
เนื้อหา
การเตรียมตัว
ไพทอนและไลบรารีที่เกี่ยวข้อง
วิกินี้ใช้ภาษาไพทอนและไลบรารีที่เกี่ยวข้องดังนี้
- Anaconda Scientific Python Distribution - ดูขั้นตอนจากวิกิ Python Programming/Setting Up Python
- ไลบรารี PyUSB - ดูขั้นตอนจากวิกิ การติดตั้งไลบรารี PyUSB
- ไลบรารี Visual (VPython) - ดูขั้นตอนจากวิกิ การติดตั้งไลบรารี Visual
บอร์ดไมโครคอนโทรลเลอร์และโมดูลไดรเวอร์
บอร์ดไมโครคอนโทรลเลอร์ที่นำมาใช้เป็นตัวควบคุมผู้เล่นในวิกินี้ต้องถูกโปรแกรมเฟิร์มแวร์ให้สามารถอ่านค่าแสงผ่านพอร์ท USB ได้แล้ว ให้แน่ใจว่า
- ได้พัฒนาเฟิร์มแวร์ตามขั้นตอนของวิกิ การติดต่อกับบอร์ดไมโครคอนโทรลเลอร์ผ่านพอร์ท USB ด้วย Arduino
- เฟิร์มแวร์รองรับการอ่านค่าแสง และได้แก้ไขโมดูลไดรเวอร์ peri.py ให้รองรับการอ่านค่าแสงในช่วง 0-1023 จากเมท็อด getLight() ได้อย่างถูกต้องตามที่ระบุไว้ในแบบฝึกหัดท้ายสไลด์บรรยาย การสื่อสารกับบอร์ด MCU ผ่านพอร์ต USB
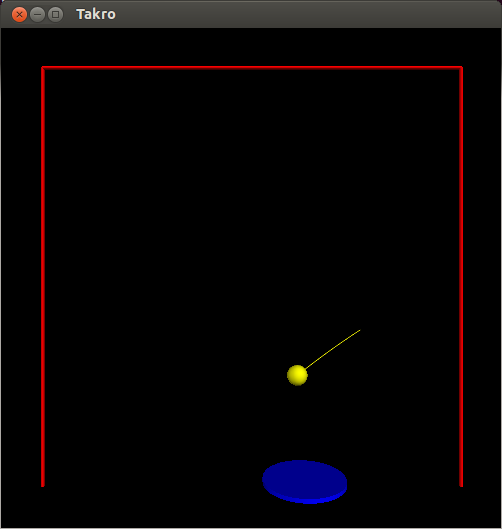
องค์ประกอบของเกม

ตัวเกมพื้นฐานประกอบไปด้วย
- กำแพงและเพดาน (สีแดง) สร้างขึ้นจากคลาส vis.curve เพื่อใช้แสดงขอบเขตด้านซ้าย ขวา และบน ลูกตะกร้อจะกระดอนกลับเมื่อเคลื่อนที่เลยขอบเขตนี้
- ลูกตะกร้อ (สีเหลือง) สร้างขึ้นจากคลาส Ball ซึ่งสืบสกุลมาจากคลาส vis.sphere มีทิศทางการเคลื่อนที่ในสองมิติซึ่งคำนวณจากกฎการเคลื่อนที่
- แป้นรับลูกที่ควบคุมด้วยผู้เล่น (สีน้ำเงิน) สร้างขึ้นจากคลาส Player ซึ่งสืบสกุลมาจากคลาส vis.cylinder มีการเคลื่อนที่ในทิศทางซ้ายและขวาตามความเข้มของแสงที่อ่านได้จากบอร์ดไมโครคอนโทรลเลอร์
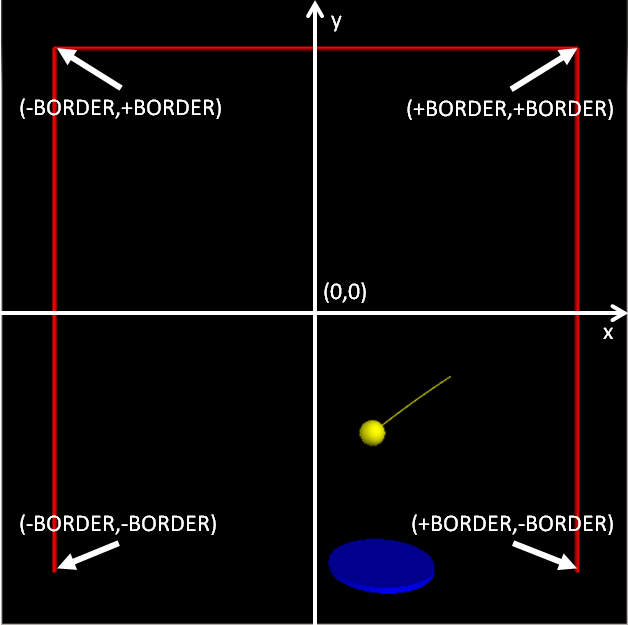
ระบบพิกัด
VPython ใช้ระบบพิกัดในปริภูมิ 3 มิติ อย่างไรก็ตามตำแหน่งต่าง ๆ ของผู้เล่น ลูกตะกร้อ และกำแพง จะวางตัวอยู่ในระนาบ z=0 โดยที่พิกัด (x,y) มีทิศทางและขอบเขตดังภาพ ในที่นี้ BORDER เป็นค่าคงที่ที่กำหนดขึ้นมาในโปรแกรมซึ่งสามารถปรับเปลี่ยนขอบเขตได้ตามต้องการ

สร้างสนามและตั้งค่าคงที่เพื่อใช้ในเกม
ใช้เท็กซ์เอดิเตอร์สร้างไฟล์ชื่อ takro.py ตามโค้ดด้านล่าง
1 import vis
2
3 ANIM_RATE = 30
4 BORDER = 10
5 scene = vis.display(title='Takro',x=100,y=100,width=500,height=500)
6 scene.center = (0,0)
7 scene.range = BORDER*1.2
8
9 border = vis.curve(pos=[
10 (-BORDER,-BORDER),
11 (-BORDER,+BORDER),
12 (+BORDER,+BORDER),
13 (+BORDER,-BORDER)
14 ],radius=0.1,color=vis.color.red)
15
16 while True:
17 vis.rate(ANIM_RATE)
- บรรทัดที่ 1 อิมพอร์ตโมดูล vis ซึ่งเป็นโมดูลหลักของ VPython
- บรรทัดที่ 3-4 กำหนดค่าคงที่เพื่อใช้ในโปรแกรม โดย ANIM_RATE ใช้กำหนดอัตราการอัพเดตหน้าจอต่อวินาที และ BORDER ใช้กำหนดขอบเขตของสนามตามที่อธิบายไว้ในหัวข้อระบบพิกัดข้างต้น
- บรรทัดที่ 5-7 สร้างหน้าต่างขนาด 500x500 ที่มีหัวข้อ "Takro" ขึ้นมา หน้าต่างนี้ทำหน้าที่เสมือนช่องที่มองเข้าไปในปริภูมิสามมิติของ VPython โดยให้พิกัด (0,0) อยู่ที่จุดศูนย์กลางของหน้าต่าง และช่องหน้าต่างมีขอบเขตครอบคลุมพิกัด (-BORDER,-BORDER) - (+BORDER,+BORDER) ออกไป 20%
- บรรทัดที่ 9-14 สร้างกำแพงและเพดานเพื่อแสดงขอบเขตสนามด้วยเส้นสีแดง เริ่มต้นจากพิกัด (-BORDER,-BORDER) → (-BORDER,+BORDER) → (+BORDER,+BORDER) และจบลงที่พิกัด (+BORDER,-BORDER) เส้นแสดงกำแพงแต่ละท่อนมีรัศมี 0.1 หน่วย
- บรรทัดที่ 16-17 เป็นลูปอนันต์เพื่อให้โปรแกรมไม่จบการทำงาน ฟังก์ชัน vis.rate() ทำหน้าที่หน่วงเวลาเพื่อให้ลูปทำงานไม่เกินอัตราที่กำหนด (ในที่นี่คือ 30 รอบต่อวินาที) และยังทำหน้าที่ในการประมวลผลอินพุทจากเมาส์และคีย์บอร์ด ซึ่งการกดแป้น Ctrl ค้างไว้แล้วคลิ้กลากเมาส์ไปมาจะทำให้หน้าต่างหมุนเปลี่ยนมุมมอง ในขณะที่การกดแป้น Alt ค้างไว้แล้วลากเมาส์เป็นการซูมเข้าออก
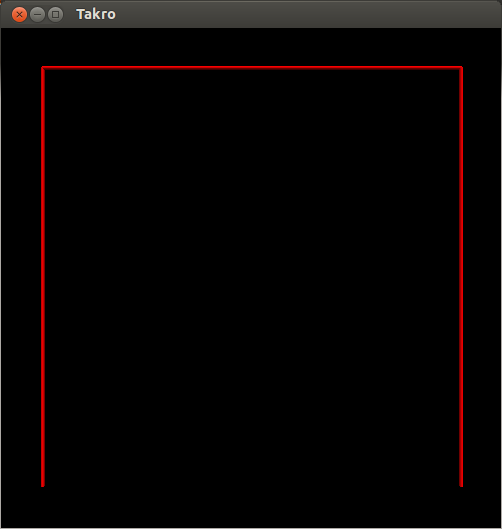
รันสคริปต์ด้วยไพทอน (ที่มากับ Anaconda) ควรเห็นหน้าต่างขนาด 500x500 ปรากฏขึ้นพร้อมกำแพงสีแดงล้อมรอบสามทิศทาง
python takro.py

สร้างลูกตะกร้อ
นิยามคลาส Ball เพื่อใช้สร้างเป็นลูกตะกร้อ โดยให้สืบสกุลมาจากคลาสทรงกลม vis.sphere ของ VPython ดังโค้ดด้านล่าง
1 import vis
2
3 ANIM_RATE = 30
4 BORDER = 10
5 scene = vis.display(title='Takro',x=100,y=100,width=500,height=500)
6 scene.center = (0,0)
7 scene.range = BORDER*1.2
8
9 ################################################################
10 class Ball(vis.sphere):
11
12 BALL_SIZE = 0.5
13
14 def __init__(self,color=vis.color.white,vel=(0,0),acc=(0,0)):
15 vis.sphere.__init__(self,pos=(0,0),radius=self.BALL_SIZE,color=color,
16 make_trail=True,retain=10)
17 self.vel = vis.vector(vel)
18 self.acc = vis.vector(acc)
19
20 def move(self,dt):
21 self.vel += self.acc*dt
22 self.pos += self.vel*dt
23
24 ################################################################
25 border = vis.curve(pos=[
26 (-BORDER,-BORDER),
27 (-BORDER,+BORDER),
28 (+BORDER,+BORDER),
29 (+BORDER,-BORDER)
30 ],radius=0.1,color=vis.color.red)
31 ball = Ball(color=vis.color.yellow,vel=(10,0),acc=(0,-5))
32
33 while True:
34 vis.rate(ANIM_RATE)
35 ball.move(1.0/ANIM_RATE)